土木工程
陈雷1, 郝东晖1, 许德方1, 卢祯辉1, 岳鑫鑫2, 张健3, 4
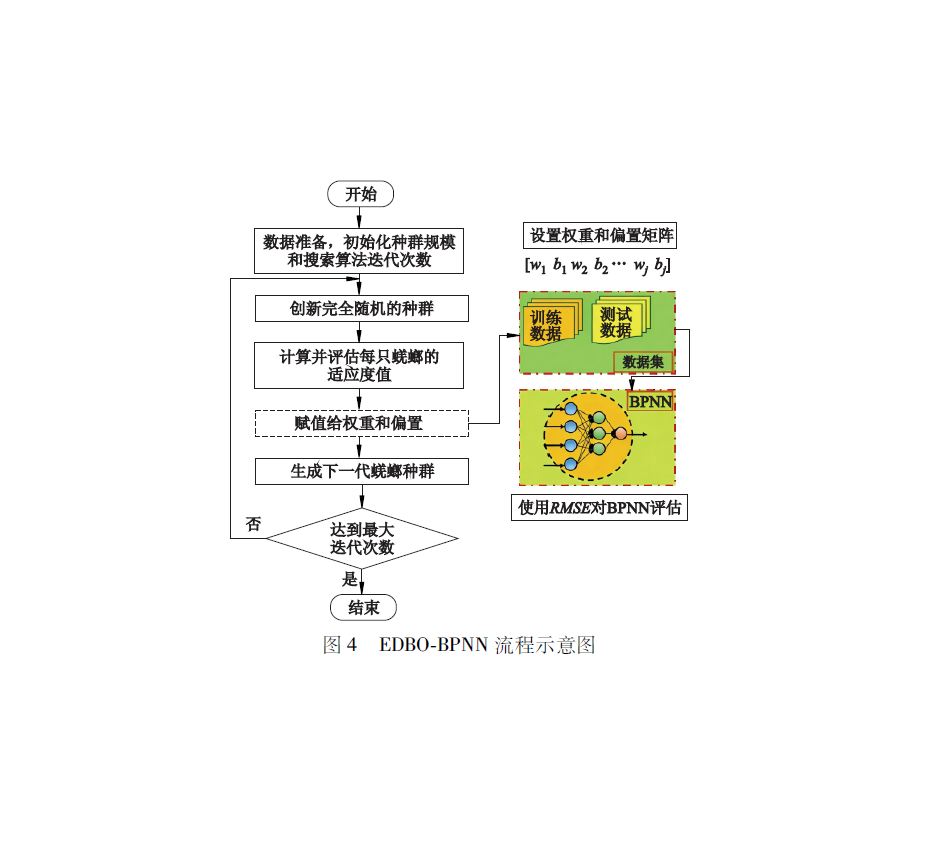
为了准确预测钢筋混凝土(reinforced concrete,RC)结构的长期挠度,并减少试验研究成本,提出了一种基于改进的蜣螂优化算法(enhanced dung beetle optimization,EDBO)和反向传播神经网络 (back-propagation neural networks,BPNN)相结合的模型,即EDBO-BPNN模型.该模型通过EDBO技术对BPNN预测模型进行优化,从而提升模型的预测能力.通过EDBO-BPNN混合模型与现有模型对RC梁在复杂环境下的长期挠度进行预测,验证了所提混合模型的预测能力.结果表明:所提出的EDBO-BPNN模型在预测钢筋混凝土结构长期挠度方面兼具高精度和强稳定性;在精度上,EDBO-BPNN模型训练集和测试集的R2分别达到0.967 5和0.957 7,均高于对比模型;RMSE分别减小到4.242 5和5.442 7,MAE分别为2.416 1和4.008 0,4项误差指标均优于其他对比模型;在稳定性上,EDBO-BPNN模型训练集与测试集的R2差值仅为0.009 8,均远小于对比模型(最大R2差值达到0.160 7),且30次独立试验的箱线图分布最为紧凑,表明其泛化能力强,过拟合风险低.