LI Shengqin, YANG Yixian, XING Jiaqi
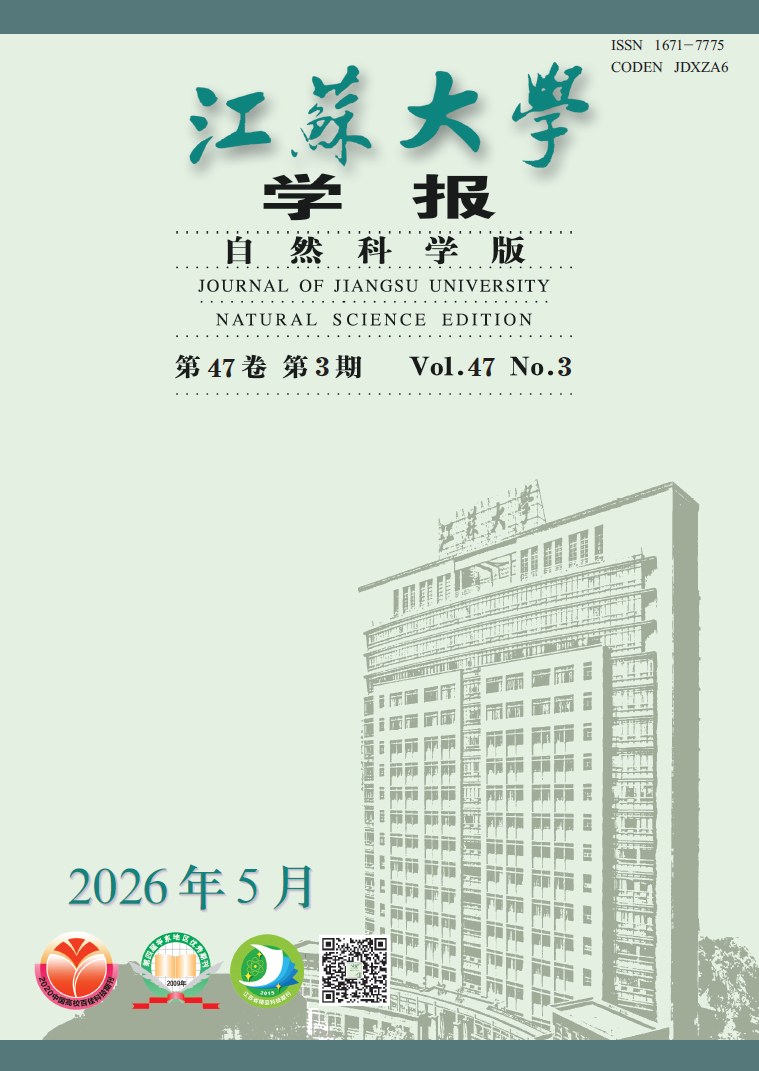
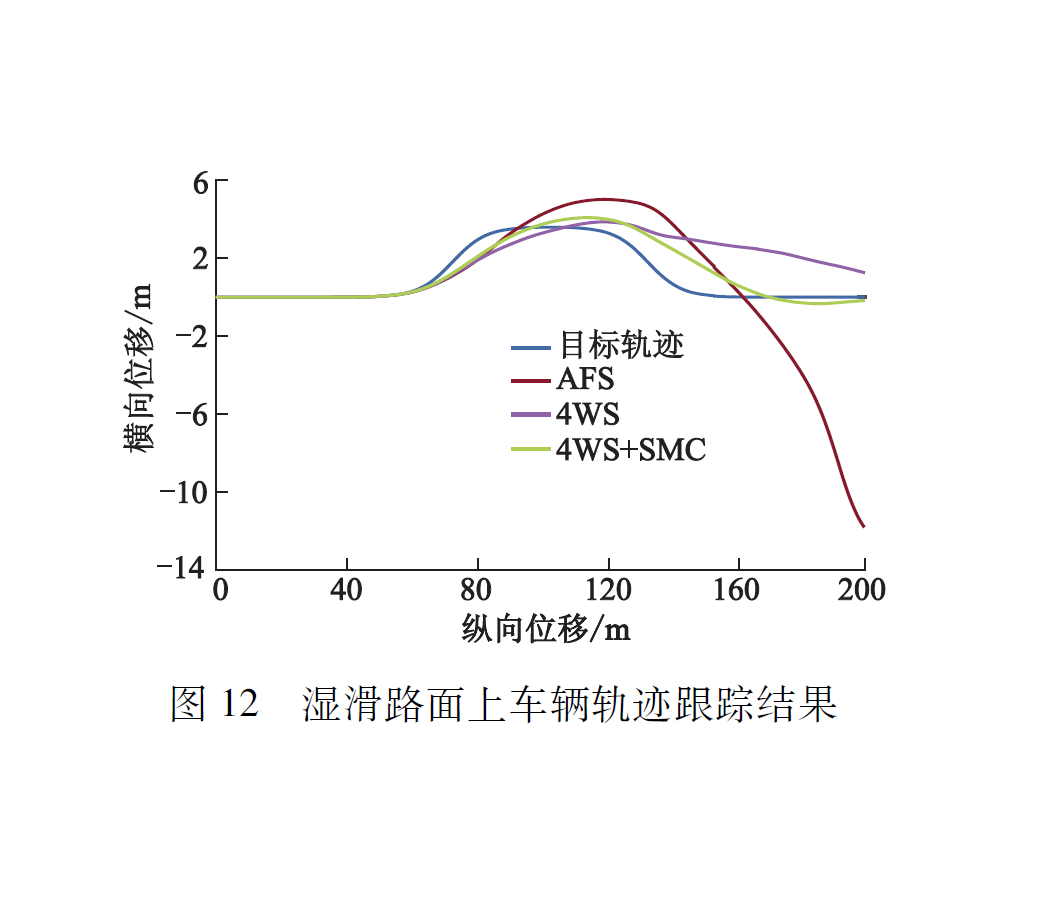
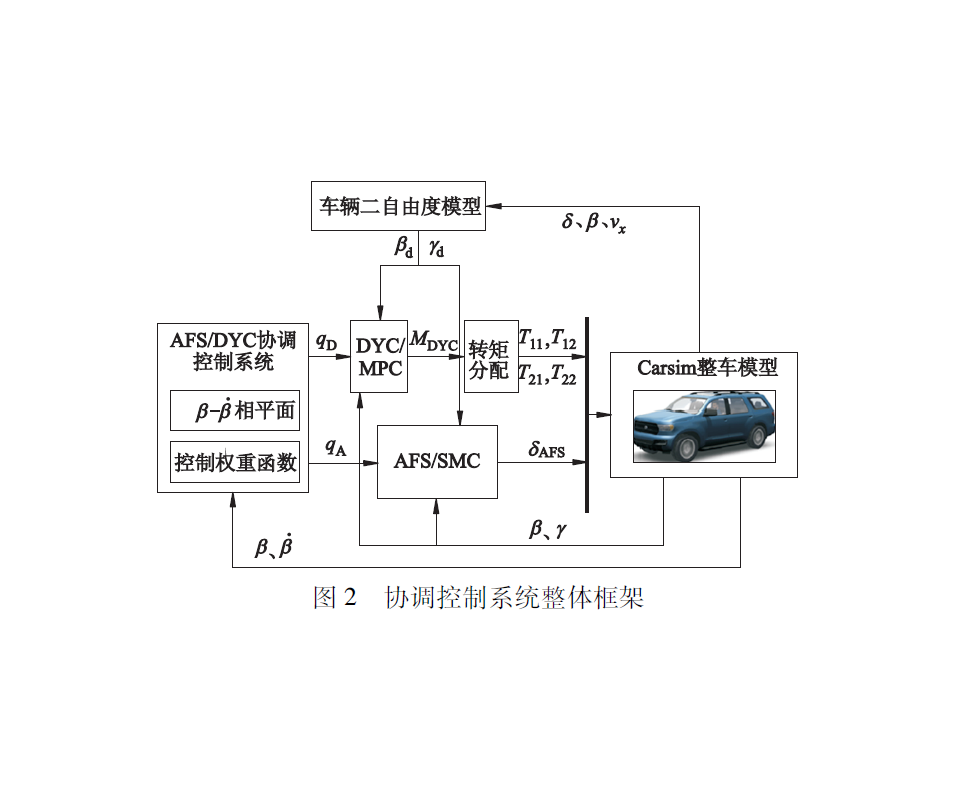
To solve the issue that ensuring the trajectory tracking accuracy of intelligent vehicles could compromise the yaw stability, the four-wheel steering system control strategy was proposed to achieve integrated control of trajectory tracking and yaw stability. The trajectory tracking controller was designed based on model predictive control, and the four-wheel steering angle allocation method was developed based on the Ackermann steering principle. According to the proposed hierarchical control strategy for yaw stability, in the upper layer, the required additional yaw moment was calculated by sliding mode control, while in the lower layer, the torque was allocated with the objective of minimizing the tire adhesion utilization rate. The co-simulation model was established to conduct path tracking simulations. The results demonstrate that compared to the conventional active front steering, under low speed conditions on dry roads, the maximum lateral displacement deviation is approximately reduced by 60.0%, and the peak values of vehicle sideslip angle and yaw rate are respectively decreased by about 91.2% and 15.4%. Under high speed conditions on dry roads, the lateral displacement deviation is reduced by 0.130 m, and the peak values of sideslip angle and yaw rate are respectively decreased by 61.8% and 27.8%. Under extreme conditions on slippery roads at a speed of 120 km/h, the maximum lateral displacement deviation is only 1.810 m with reduction of roughly 83.6%, and the peak values of sideslip angle and yaw rate are respectively reduced by about 99.0% and 90.7%. The proposed strategy significantly improves the driving stability and safety of intelligent vehicles.