PDF(12004 KB)
PDF(12004 KB)

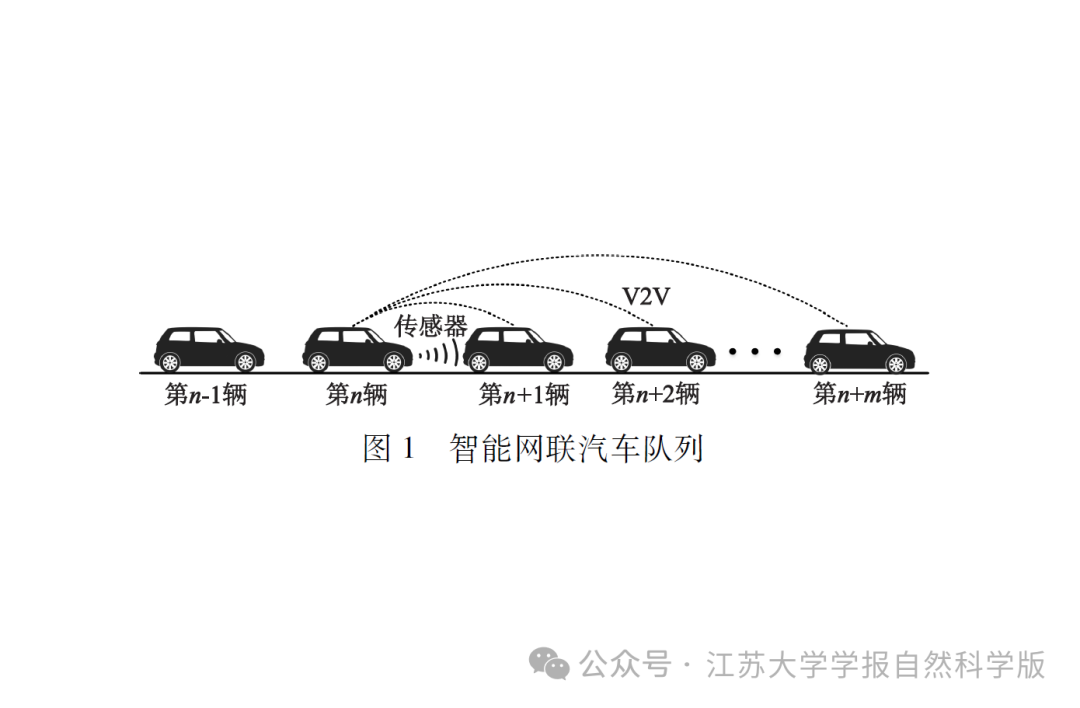
Carfollowing model of intelligent connected vehicles considering time delay and multiple front vehicle feedbacks
LI Aoxue, FEI Fan, JIANG Haobin
Journal of Jiangsu University(Natural Science Edition) ›› 2024, Vol. 45 ›› Issue (6) : 636-643.
PDF(12004 KB)
PDF(12004 KB)
Carfollowing model of intelligent connected vehicles considering time delay and multiple front vehicle feedbacks
 ({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}
({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
/
| 〈 |
|
〉 |